La demo sviluppata dall’ARSLAB del Dipartimento di Matematica e Informatica con STMicroelectronics mostra come IA e microcontrollori possano reagire in tempo reale sfidando l’uomo a colpi di robot
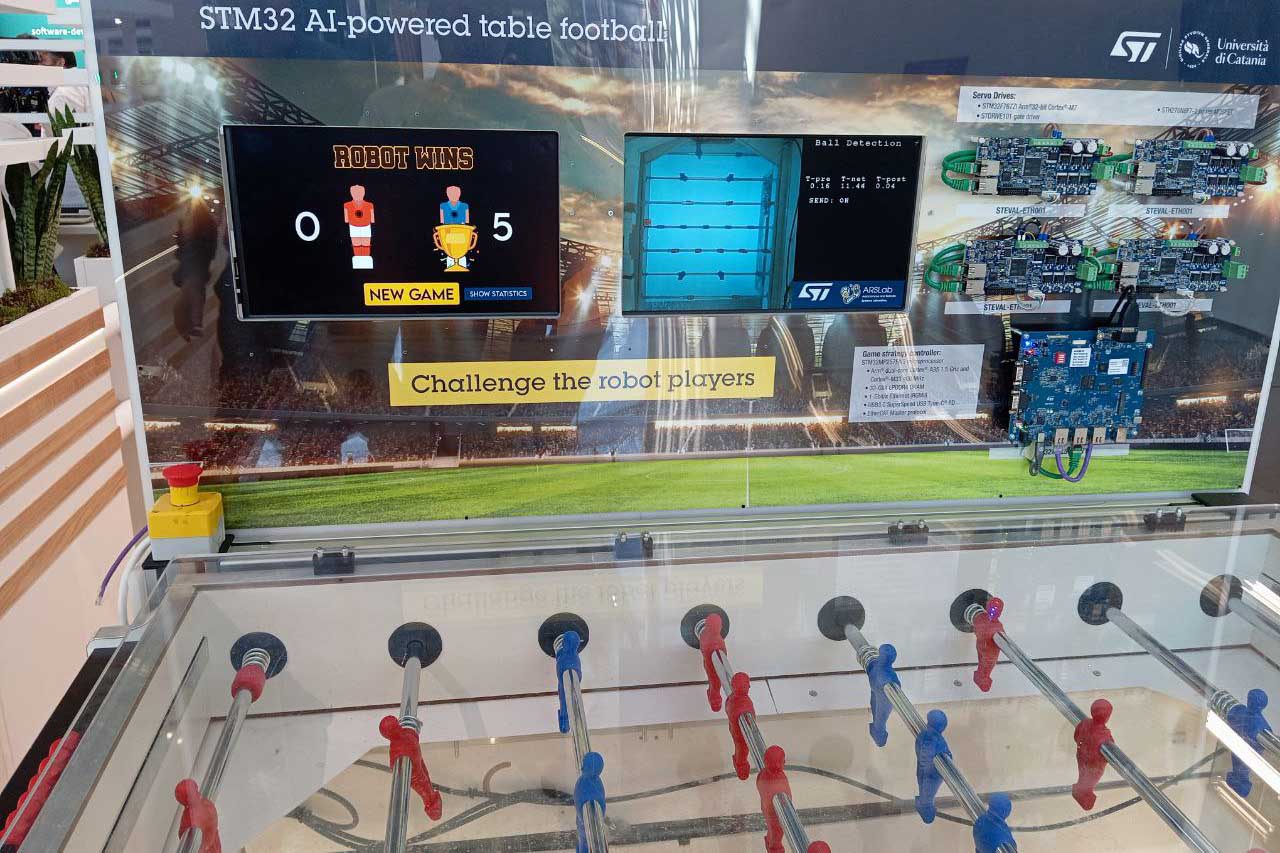
Umano contro robot, riflessi contro algoritmi. La sfida si gioca su un campo familiare a generazioni di studenti e appassionati: quello del calcio balilla. Ma questa volta, dall’altra parte delle aste, non c’è un avversario umano bensì un sistema robotico capace di osservare, prevedere e reagire in frazioni di secondo.
È alla sua quinta apparizione pubblica il “calcio balilla robotizzato” realizzato dal Laboratorio di Sistemi Robotici e Autonomi (ARSLAB) del Dipartimento di Matematica e Informatica dell’Università di Catania, in partnership con STMicroelectronics. Il sistema, infatti, ha preso parte a Embedded World 2026, la fiera internazionale dei sistemi elettronici e informatici per l’automazione industriale e la robotica in programma a Norimberga dal 10 al 12 marzo.

Il calcio balilla robotico di Unict
STMicroelectronics è presente a Norimberga con una serie di soluzioni innovative per il settore, e il calcio balilla robotico, realizzato insieme all'ateneo catanese, costituisce una delle demo di punta che mira a sfruttare l’aspetto ludico per mostrare alcune soluzioni avanzate dell'azienda italo-francese nel campo dell’intelligenza artificiale e della robotica industriale.
Il gioco, che si basa sulla sfida tra un umano e un robot, è automatizzato da un sistema di visione artificiale che permette di tracciare il movimento della pallina e da un software di “ragionamento” che individua le traiettorie della pallina e attiva i motori per la rotazione e la traslazione delle aste, con lo scopo di intercettare la palla e calciarla verso la porta dell’avversario.
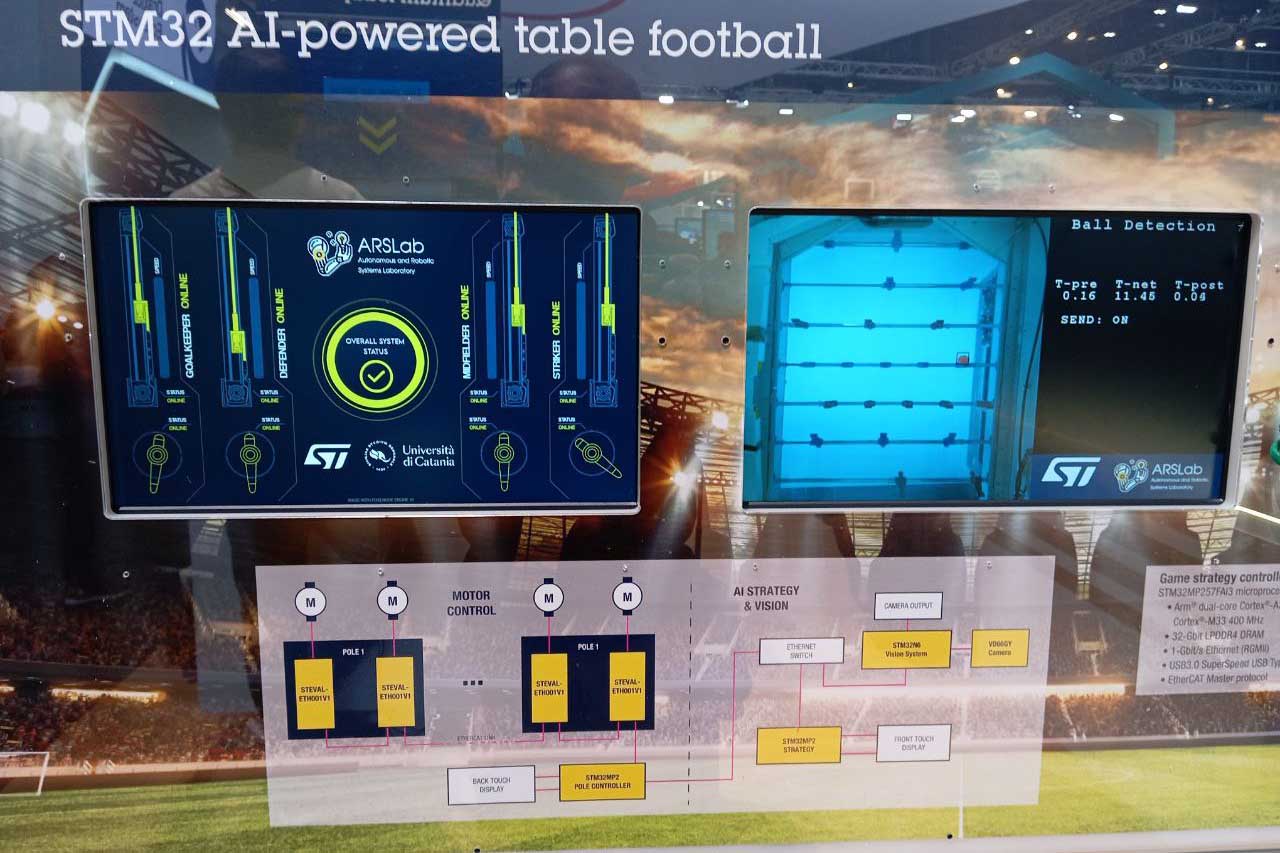
Il sistema robotico
L’aspetto importante di un sistema di questo tipo è la velocità e la capacità di reagire in tempi molto brevi: poiché la pallina può raggiungere velocità molto elevate in uno spazio ridotto, il sistema robotico deve essere in grado di operare di conseguenza, così da poter essere competitivo.
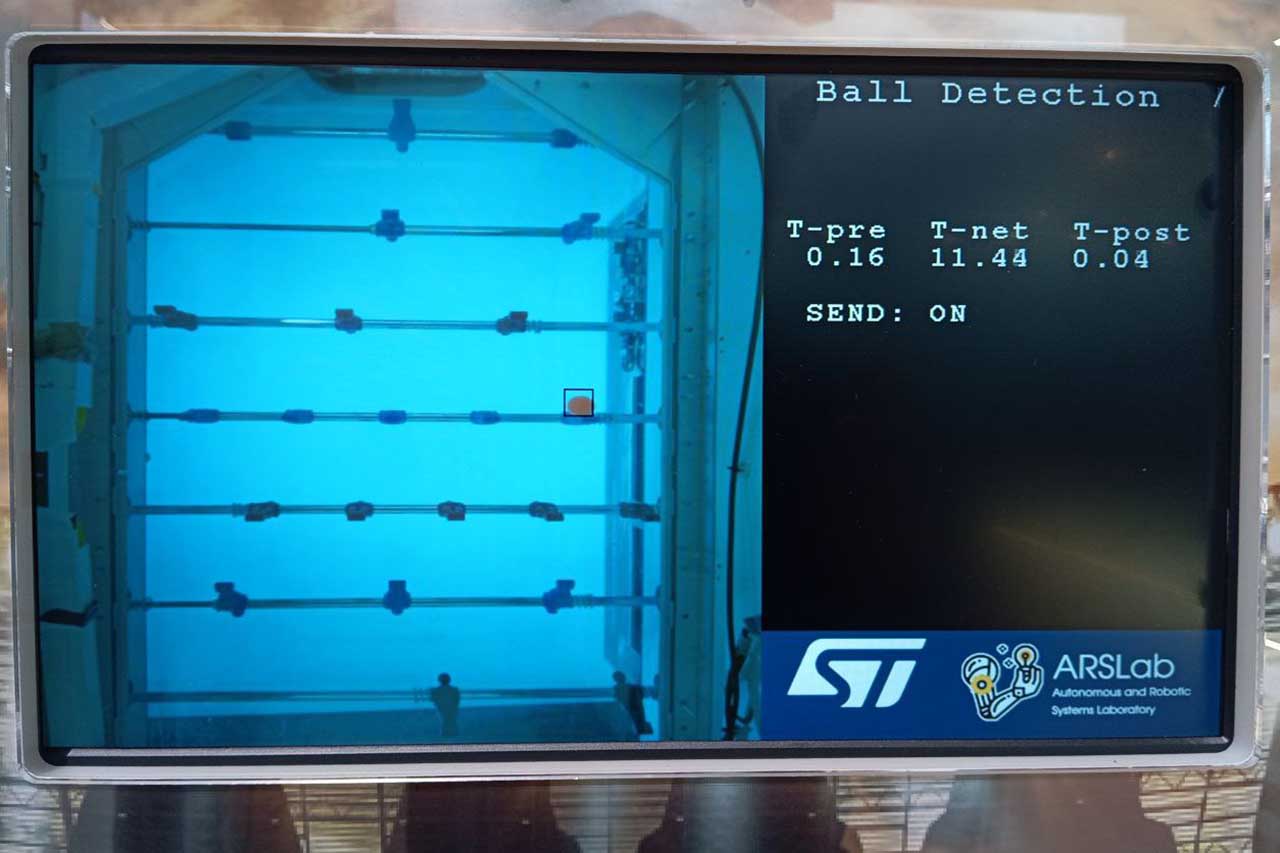
Dopo essere stato già presentato in diverse fiere internazionali, la versione esibita a Embedded World 2026 è un redesign tecnologico che ha visto un miglioramento nei due aspetti più importanti: “Abbiamo migliorato due aspetti: la parte di individuazione della pallina e la parte di strategia”, spiega il prof. Corrado Santoro, coordinatore dell’ARSLAB.
Il calcio balilla robotico di Unict
“Il primo aspetto, l'individuazione della pallina, è stato reso possibile grazie a una collaborazione con l’IPLab del DMI ed è stato realizzato sfruttando un sistema di deep learning appositamente ottimizzato per l’applicazione in oggetto; ciò ha permesso di raggiungere prestazioni notevoli su hardware STM progettato specificamente per i sistemi di AI – aggiunge -. Sul secondo aspetto, la strategia di gara, abbiamo operato attraverso l’introduzione di un algoritmo per la predizione delle possibili traiettorie e posizioni future della palla, in modo da poter azionare le aste di conseguenza”.
L’aspetto tecnico particolarmente interessante di un sistema del genere è rappresentato dal fatto che è interamente costituito da “microcontrollori”, cioè dispositivi programmabili specializzati che presentano però prestazioni notevolmente inferiori – e conseguentemente anche costi e consumi più bassi – rispetto ai classici server dei datacenter dove, in genere, vengono eseguiti i sistemi di AI. Nonostante ciò, il team del Dipartimento di Matematica e Informatica, attraverso uno studio attento e una serie di ottimizzazioni software, è riuscito a raggiungere velocità operative tali da rendere il robot competitivo e difficile da battere.
Un dispositvo del calcio balilla robotico